最近企业定向班计划
广电计量FPGA测试工程师定向班,企业真实案例学习,考核通过后企业直签。
2026年3月开班计划:
FPGA逻辑开发班、FPGA测试定向班
开班时间:3月30日(预科)
开班地点:成都基地(成都ai创新中心)
夏令营开班计划:
开班时间:7月6日(暂定)
开班地点:成都基地(成都ai创新中心)
成电国芯针对零基础学员设计了一套系统化的FPGA入门培养方案,以“需求分析-原理讲解-代码实操-仿真验证-上板调试”为核心流程,结合企业级项目实战,帮助学员从理论到工程能力全面突破。以下是具体流程及案例解析:
行业需求调研:结合华为、中兴等合作企业的FPGA岗位需求,明确核心技能(如Verilog编程、时序约束、高速接口设计)。
项目目标拆解:将复杂项目(如通信模块、图像处理)拆解为可执行的子任务,例如“智能循迹小车”需实现传感器数据采集、电机控制、路径决策等模块。
学习路径规划:根据学员基础定制阶段性目标,例如零基础学员先掌握“数字电路基础→Verilog语法→工具链操作”,再进阶到项目开发。
硬件原理可视化:
数字电路核心概念:

Verilog教学三步法:
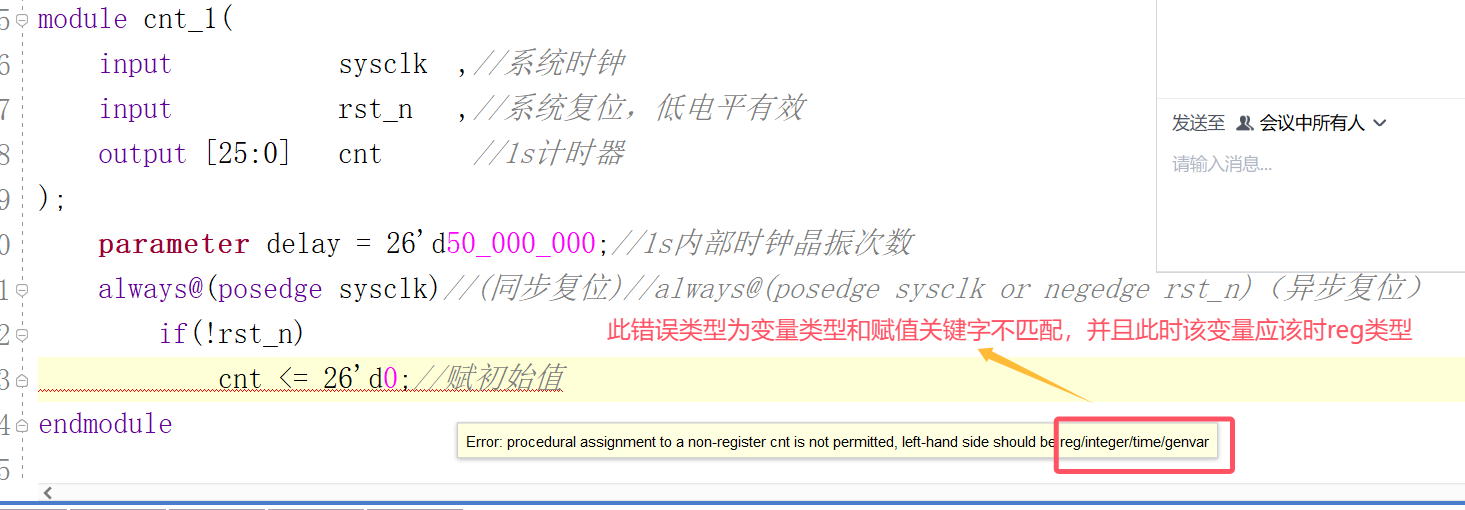
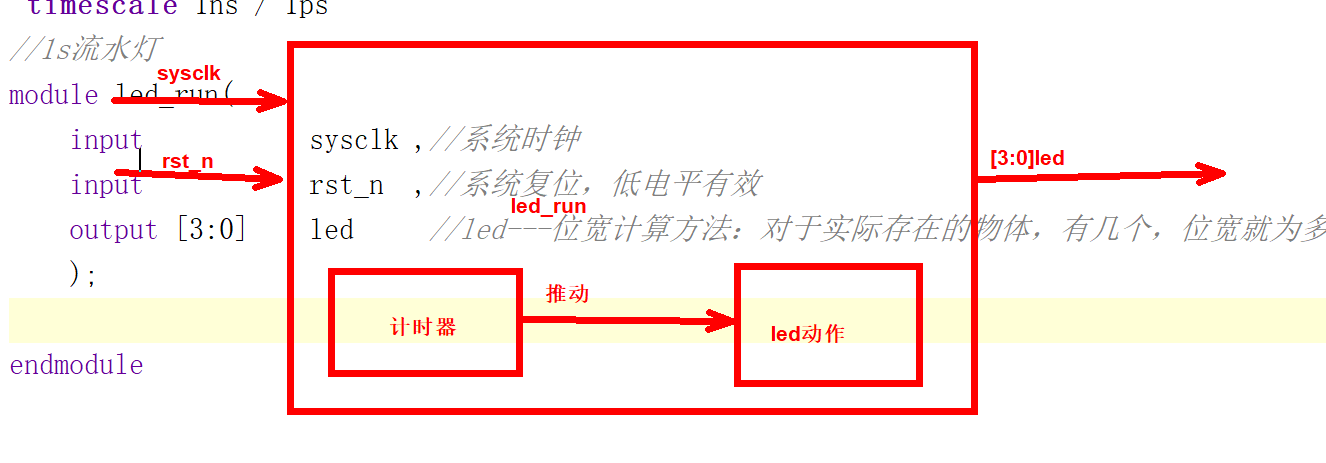
module定义、assign连续赋值,强调“硬件并行性”与软件的区别(如避免for循环滥用);module led_flow(
input clk, // 系统时钟(50MHz)
input rst_n, // 复位信号(低电平有效)
output reg [3:0] led // 4位LED输出
);
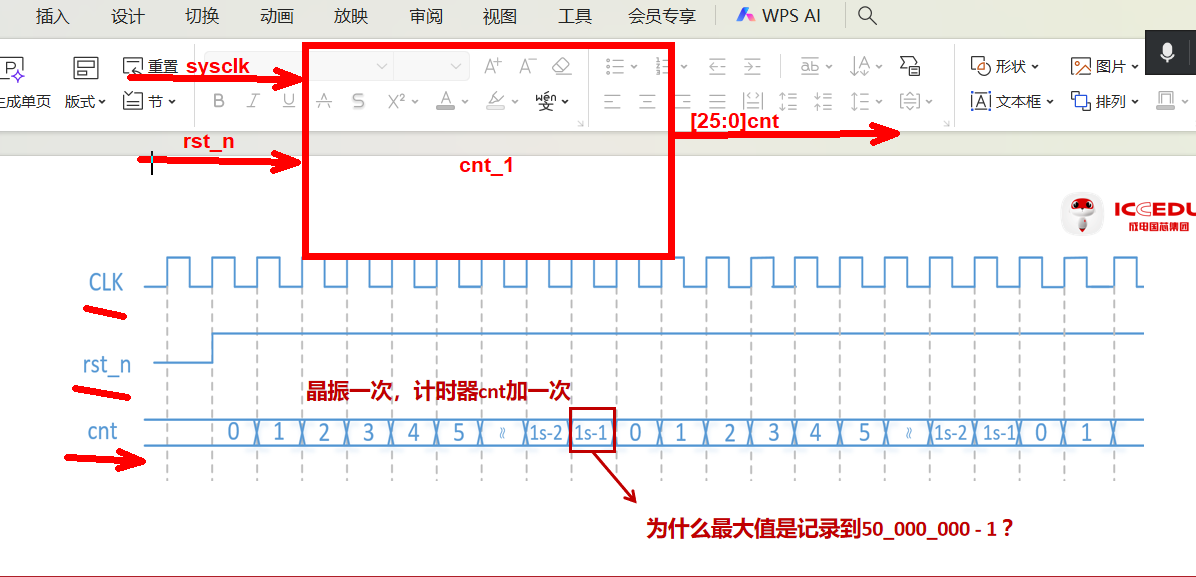
reg [23:0] cnt; // 计数器,用于分频(50MHz→2Hz)
always @(posedge clk or negedge rst_n) begin
if(!rst_n) cnt <= 0; // 复位时计数器清零
else cnt <= cnt + 1; // 时钟上升沿计数
end
always @(posedge clk or negedge rst_n) begin
if(!rst_n) led <= 4'b0001; // 初始状态:第一个LED亮
else if(cnt == 24'd25_000_000) begin // 0.5秒切换一次
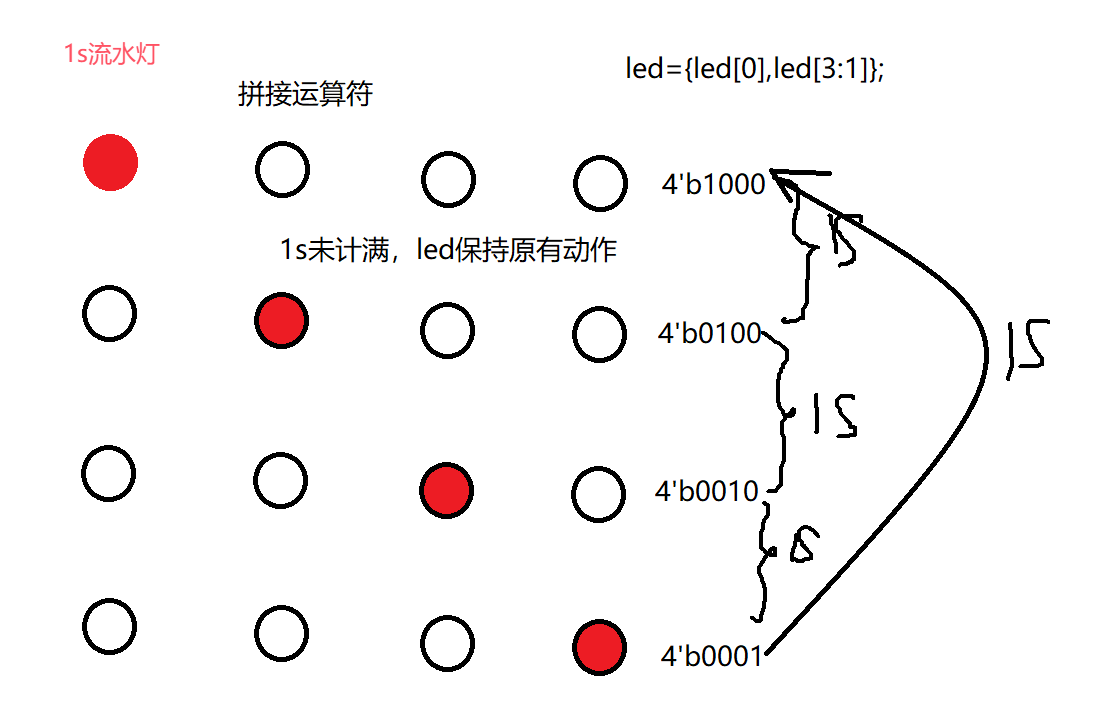
led <= {led[2:0], led[3]}; // 左移操作,实现流水效果
end
end
endmoduleTestbench编写:
为“LED流水灯”编写仿真激励,模拟时钟、复位信号,并监测LED输出:
module tb_led_flow;
reg clk;
reg rst_n;
wire [3:0] led;
led_flow uut(.clk(clk), .rst_n(rst_n), .led(led));
initial begin
clk = 0; forever #10 clk = ~clk; // 生成50MHz时钟(周期20ns)
end
initial begin
rst_n = 0; #200 rst_n = 1; // 复位200ns后释放
#1000000 $finish; // 仿真1ms后结束
end
endmodule波形图分析:
通过ModelSim观察cnt计数器变化与led状态切换的对应关系,验证“每0.5秒左移一次”的逻辑是否正确,重点标注时钟沿与数据更新的时序关系。
开发工具链操作:
使用Vivado完成“工程创建→综合(Synthesis)→实现(Implementation)→生成比特流(Bitstream)”全流程,讲解“时序约束”(如设置输入输出延迟)对硬件稳定性的影响。
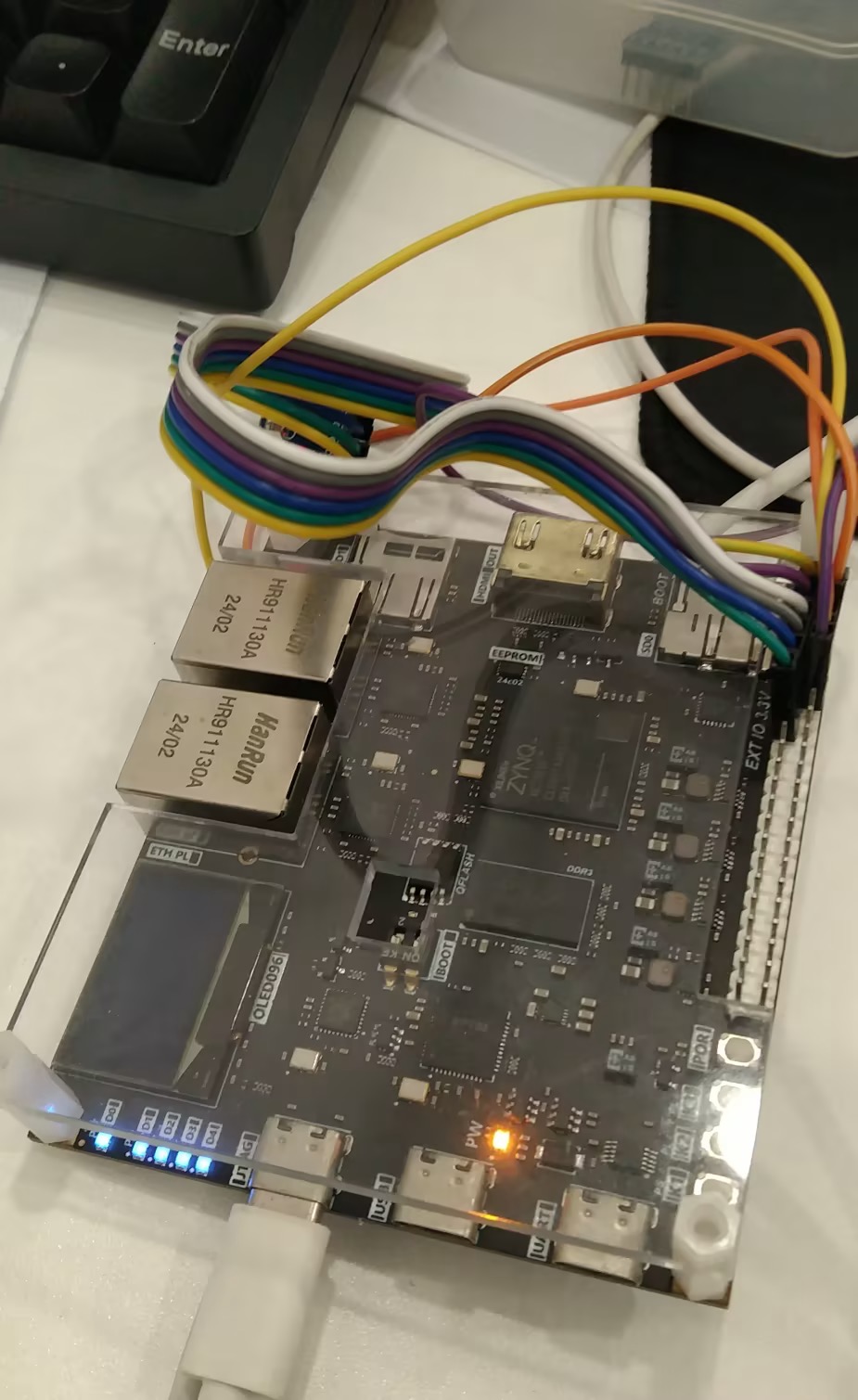
板级调试技巧:
module pid_controller(
input clk,
input rst_n,
input [11:0] error, // 轨迹偏差(传感器差值)
output reg [9:0] pwm_out // 电机PWM占空比
);
reg [11:0] integral, derivative;
reg [11:0] error_prev; // 上一周期偏差
parameter Kp=5, Ki=1, Kd=2; // 控制参数
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
integral <= 0;
derivative <= 0;
error_prev <= 0;
end else begin
integral <= integral + error; // 积分项累加
derivative <= error - error_prev; // 微分项=当前偏差-上一偏差
error_prev <= error;
pwm_out <= Kp*error + Ki*integral + Kd*derivative; // PID输出
end
end
endmoduleerror信号波形,发现传感器采样延迟,需在代码中加入数据缓存模块优化。通过以上流程,成电国芯将抽象的FPGA技术转化为“可拆解、可验证、可落地”的工程能力,零基础学员可在4-6个月内掌握从需求分析到上板调试的全流程开发技能。